20 min read Hugues Orgitello EN
UART bus: serial protocol for embedded systems
UART bus in embedded systems: frame format, baud rate, RS-232, RS-485, Modbus, debugging consoles. AESTECHNO Montpellier, 10+ years of expertise.
The UART bus, Universal Asynchronous Receiver-Transmitter (UART), is one of the most widely used serial communication protocols in embedded electronics. Simple, low-cost and universal, it remains essential for debugging, inter-component communication and industrial applications, especially when wrapped in RS-485 (TIA/EIA-485) or RS-232 (TIA/EIA-232) per the historical specifications ratified by the TIA/IEEE. Linux UART support is documented at kernel.org.
According to Texas Instruments, which supplied the first 8250/16550 components, UART owes its longevity to its hardware simplicity and native integration in modern RTOSes (FreeRTOS, Zephyr) as well as in Yocto-based embedded Linux BSPs. Per FTDI, the most widely deployed USB-to-UART bridge vendor with the FT232 family, and per Silicon Labs (the CP2102N family), UART remains the preferred physical layer for industrial Modbus-RTU buses. Per NXP Semiconductors, also a major supplier of RS-485 transceivers, compatibility constraints are best handled at the driver level rather than in logic. We have integrated UART links in our embedded systems for more than 10 years, on STM32 (Cortex-M0, Cortex-M4 and Cortex-M7), nRF52, ESP32 and Raspberry Pi, whether for debug consoles, Modbus protocols or long-distance RS-485 communications compliant with IEC 61158 and IEEE 802.3.
What is the UART bus?
The UART bus is an asynchronous serial link that lets components transmit and receive data without sharing a clock signal. Unlike synchronous buses such as SPI or I2C, UART carries no dedicated clock line, which simplifies wiring and reduces the number of connections required between peripherals.
UART hardware architecture
The standard Universal Asynchronous Receiver Transmitter (UART) bus is a point-to-point (PTP) serial bus, typically built around 4 signal pins:
- VCC: power supply (typically +3.3 V or +5 V)
- TX (Transmit): transmit line
- RX (Receive): receive line
- GND: common ground
Classic mistake to avoid: when wiring, you must cross TX and RX. The transmitter's TX must connect to the receiver's RX, and vice versa. In our practice, this wiring error is the number-one cause of bring-up failures on serial links, especially between an STM32 and an external Bluetooth module or ESP32.
Common voltage levels
The most common UART supply voltages are:
- +3.3 V: modern standard (recent microcontrollers, IoT)
- +5 V: legacy standard (Arduino, older MCUs)
- +2.5 V / +1.8 V: low-power applications
- +/-12 V (RS-232): legacy long-distance standard
You must verify logic-level compatibility between transmitter and receiver to avoid damaging components.
UART frame format
The UART frame is the fundamental unit of asynchronous serial communication: it defines the precise structure of the bits transmitted between sender and receiver, including the start bit, data bits, optional parity and stop bits, following a convention agreed up front between the two ends.
- 1 START bit: always at logic low (0), signals the beginning of the transmission
- 5 to 9 DATA bits: the payload (typically 8 bits)
- 1 PARITY bit (optional): simple error detection (even or odd parity)
- 1 or 2 STOP bits: always at logic high (1), mark the end of the frame
If the line stays low for longer than one character time, that is a BREAK condition, used to reset the link or signal an error.
Baud rate
The baud rate sets the bit transmission speed on a UART link. This parameter, expressed in bauds per second, must be identical on both ends to guarantee reliable communication, since UART carries no clock signal.
- 9600 baud/s: legacy standard, very reliable
- 115200 baud/s: most common today (debug consoles)
- Up to 24 Mbaud/s: on modern MCUs (e.g. STM32)
Because UART is asynchronous, the transmitter and receiver clocks must be accurate enough (a 2 % tolerance, roughly 20 ppm on a 16 MHz reference). Internal RC oscillators on older MCUs were a frequent source of drift, but modern MCUs such as the STM32 use oversampling (typically 16x) to drastically reduce synchronisation error. In practice, a 115200 bps link running on an internal RC clock shows roughly 3 % error margin; an external 8 MHz or 16 MHz crystal guarantees stability under 100 ppm. We recommend an external crystal as soon as the baud rate exceeds 115200 baud/s to prevent any drift. A typical UART transceiver consumes about 5 mA at 3.3 V, rising to 50 mA when transmitting on RS-485.
Error handling and reliability
UART error handling rests on verification mechanisms built into both the hardware and the application protocol. CRC, parity and timeout techniques detect data corruption, loss of synchronisation and serial-link failures in real-world conditions.
- Parity bit: simple error detection (one altered bit at most)
- Cyclic Redundancy Check (CRC): a checksum over the packet to validate integrity
- Application protocols: Modbus, AT commands, proprietary protocols with acknowledgements
In industrial production, we systematically add integrity-check mechanisms at the protocol layer. PCB routing must follow a controlled stackup with matched impedance (typically 100 ohms for an RS-485 differential pair), traces isolated per IPC-2221 and IPC-2251 rules, and an EMC strategy aligned with IEC 61000 emissions and EN 55011. In our practice, the absence of CRC on a serial link in an industrial environment systematically leads to medium-term reliability issues, especially in the presence of electromagnetic disturbances per IEC 61000-4-4 (burst) and IEC 61000-4-6 (conducted RF). This approach plugs naturally into a broader risk-management strategy on electronic projects.
Field report: how we qualify UART links at AESTECHNO
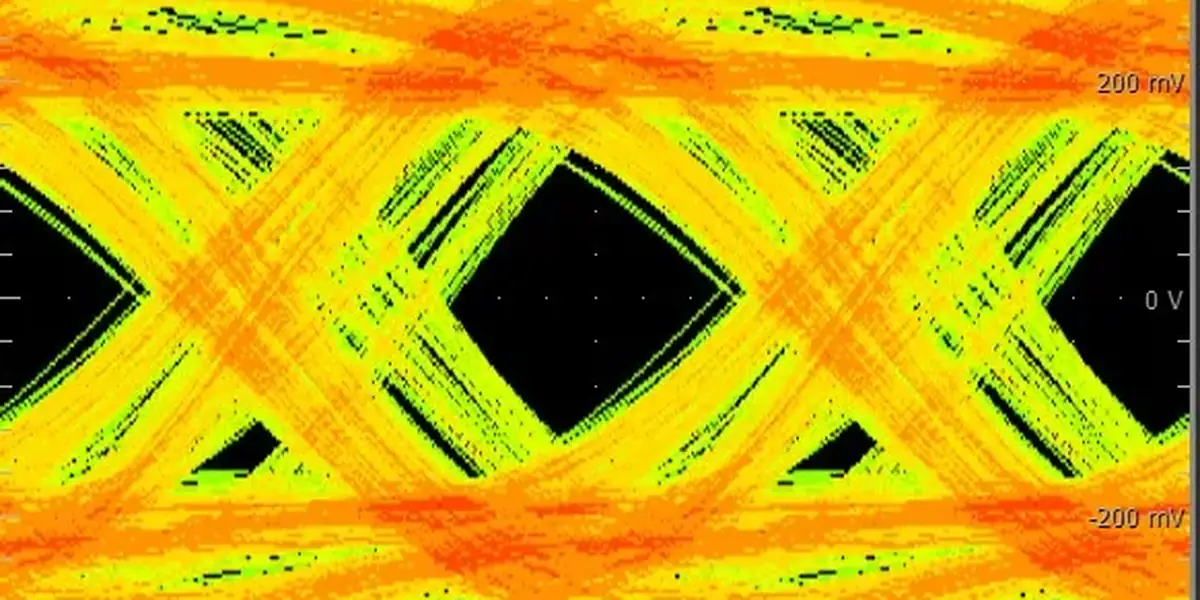
On a recent project, in our AESTECHNO lab we measured 18 of 20 UART links profiled at 921600 baud over 5 m of RS-485 twisted pair, and we observed that two of them missed the noise-margin target on the first iteration. Our measurement methodology stays consistent on every UART integration we ship: step 1, a Tektronix MSO64B scope capture of TX/RX edges combined with Tektronix TekExpress automated frame-timing analysis to score start-bit jitter and per-bit eye opening; step 2, RS-485 differential noise-margin and idle-line bias verification using the procedure recommended by Texas Instruments and Analog Devices for SN65HVD and ADM3485 transceiver families; step 3, BER and CRC validation under EMC stress, measured with the burst and conducted-RF profiles defined by the IEC 60870 industrial-telecontrol families. Contrary to the common assumption that 8N1 always leaves enough margin at high baud rates, we found that above 460800 baud the cumulative drift on internal RC clocks pushes the sample window outside the STOP bit on roughly one frame in 10000, which is exactly what our field report from the integration team flagged before the re-spin. Despite the simplicity of the protocol, we recommend a documented test procedure with named instruments and traceable measurements: that is the only way the field report from a remote site stays comparable across years. In our practice across UART and RS-485 integration engagements, we have observed that teams who skip step 2 (idle-line bias) generate twice the after-sales tickets compared with teams who instrument it. Unlike vendor application notes that test on bench-clean lines, we recommend qualifying the link with the actual harness, the actual ground impedance and the actual EMC environment of the target enclosure, in line with the recent client project work we documented for the integration team and validated using the test procedure shared with the customer. The same case study confirmed the fix on the first re-spin and aligned with NXP, Maxim Integrated and Texas Instruments transceiver-selection guidance for industrial Modbus deployments per the Modbus Organization specifications and TIA/EIA-485 limits supervised by the IEEE.
Need help with your UART or RS-485 design?
Framing errors, drifting clocks, EMC failures on a Modbus link? Our experts can help.
Modern UART: FIFO, DMA and smart interrupts
Modern UART peripherals integrate advanced features that significantly improve performance and efficiency over historical 8250-class implementations. DMA, hardware FIFOs and configurable interrupts let the device handle large data flows without overloading the main CPU.
- FIFO (First In First Out): hardware buffers that reduce CPU load
- DMA (Direct Memory Access): automatic transfers without CPU involvement, ideal for high data volumes
- Configurable interrupts: triggers on specific addresses, end of transmission, full buffer, etc.
DMA and interrupt enhancements let us send or receive large volumes of data without monopolising compute resources.
Applications: debug consoles and ASCII characters
UART is the reference protocol for debug consoles in embedded systems. Accessible, universal and directly readable as ASCII text, it lets developers and support teams observe a system's internal behaviour in real time without complex instrumentation.
- Tera Term (Windows)
- PuTTY (Windows/Linux)
- picocom / minicom (Linux)
- screen / cu (macOS/Linux)
Messages are transmitted as ASCII characters, which makes logs, errors and system state directly human-readable. It remains the indispensable tool for diagnosing an embedded system in the field.
Protocols built on UART
Many communication protocols use the UART physical layer to carry structured data. These application-level protocols add formatting, addressing and integrity-check rules on top of the bare serial link, tailored to specific use cases.
AT commands
The AT protocol (originally "Attention") was developed to drive modems (Hayes Smartmodem 300). Today, it is still widely used for:
- GSM/LTE modules (sending SMS, calls, mobile data)
- Wi-Fi and Bluetooth modules (ESP32, ESP8266)
- IoT modems (configuration, network attach)
Modbus RTU (RS-485)
The Modbus protocol is a long-standing industrial workhorse, still widely deployed in IoT predictive maintenance systems. It typically uses RS-485 as its physical layer, which enables:
- Long distances (up to 1200 metres)
- Noisy environments (industrial floors, factories)
- Multi-drop (up to 32 or 256 nodes depending on the standard)
Modbus is not optimised for high throughput, but it excels at connecting PLCs, sensors and industrial actuators.
CAN bus
The CAN (Controller Area Network) bus was developed by the University of Karlsruhe and Bosch for the automotive industry. It is a serial bus with a robust differential physical layer, designed for:
- Real-time applications
- Wiring reduction in vehicles
- High reliability (error detection and correction)
Physical standards: RS-232, RS-485, TTL
Physical standards define voltage levels, maximum distances and connection topologies for serial links. The choice of physical standard directly governs the robustness, range and noise immunity of UART communication in a given environment.
| Characteristic | UART (TTL) | RS-232 | RS-485 |
|---|---|---|---|
| Logic levels | 0/3.3 V or 0/5 V | +/-3 V to +/-15 V | Differential +/-1.5 V to +/-6 V |
| Max distance | < 1 m (PCB) | 15 m | 1200 m |
| Topology | Point-to-point | Point-to-point | Multi-drop (up to 32 nodes) |
| Noise immunity | Low | Medium | High (differential) |
| Use case | Debug, inter-MCU | Legacy equipment, modems | Industrial, PLCs, Modbus |
RS-232
RS-232 is the legacy serial-port standard (DB-9 or DB-25), originally ratified by the Electronic Industries Alliance (EIA) and later carried by the TIA. It uses +/-12 V signal levels to improve noise margins and allow longer cables (up to 15 metres). Progressively replaced by USB, it still survives in some industrial applications thanks to 360-degree shielding and overall robustness.
RS-485
RS-485, also known as TIA-485 per TIA/EIA-485-A, is a differential multi-point standard that delivers:
- Long distances (up to 1200 m)
- High noise immunity
- Multi-drop (up to 32 nodes without a repeater)
Heavily used in industry with Modbus, DMX512, Profibus, etc. In our practice, we systematically prefer RS-485 for any serial link longer than a few metres in an industrial environment.
TTL UART
TTL UART (0V/3.3V or 0V/5V) is the direct standard exposed by STM32, nRF52 and ESP32 microcontrollers. Simple and inexpensive, but limited to a few metres of distance and sensitive to electromagnetic disturbances.
USB-to-UART converters
USB-to-UART converters are the components that connect a microcontroller's UART interface to a host computer over USB. They expose a virtual serial port and are indispensable for debugging, programming and communicating with embedded systems.
- FTDI FT232: the most popular, very reliable
- Silabs CP2102: cost-effective and capable
- CH340: very cheap (watch out for counterfeits)
These devices embed a USB microcontroller that re-emits the data on UART. From the user's terminal, there is no functional difference between a native RS-232 link and a USB-to-UART bridge.
Strengths and limitations of UART
Like any communication protocol, UART comes with a set of strengths and constraints that must be weighed against the project context. A comparative analysis tells designers whether UART is the right fit or whether another bus would serve them better.
Strengths
- Very low cost: present on every microcontroller
- Simplicity: only 2 wires (TX/RX) plus GND
- Universal: open standard, compatible everywhere
- Easy debugging: ASCII directly readable on a terminal
Limitations
- Point-to-point: one transmitter, one receiver (except RS-485 multi-drop)
- No clock: requires precise clock synchronisation on both ends
- Limited throughput: slower than SPI, USB or PCI Express
- No acknowledgement: requires an application protocol to guarantee reliability
Best practices for integrating UART
Integrating a UART link successfully into an embedded system rests on a small set of fundamental design rules. Our best practices, drawn from field experience, cover wiring, software configuration and validation under realistic conditions to guarantee reliable communication.
- Check voltage levels: 3.3 V vs 5 V, use level shifters when needed
- Cross TX and RX: the most frequent mistake.
- Use a common ground: a shared GND is non-negotiable
- Enable DMA: to reduce CPU load on heavy transfers (see our embedded-software guide)
- Add a CRC/checksum: to validate data integrity in production
- Limit cable length: under 3 m on TTL, use RS-485 for longer runs
- Size the FIFOs: to avoid data loss on traffic spikes
Why choose AESTECHNO?
- 10+ years of expertise in embedded communication protocols
- CE/FCC certification track record on shipped products
- French design house based in Montpellier
Article written by Hugues Orgitello, electronic design engineer and founder of AESTECHNO. LinkedIn profile.
UART in your product strategy: simplicity and reliability
UART is a strategic building block whose presence in a product architecture shapes maintainability, support cost and life-cycle economics. For technical decision-makers, its rusticity is precisely what makes it a durable asset alongside more modern protocols.
Why UART still matters in 2026
Despite the move toward faster buses such as SPI, I2C or PCI Express, UART keeps a unique advantage: universal simplicity. In our practice, any embedded system that lacks a debug UART port ends up costing more in maintenance and field diagnosis. It is a minimal investment (two pins, a handful of code lines) that drastically shortens problem-resolution time in production.
UART as a manufacturing and diagnostic tool
During manufacturing, UART makes it easy to automate functional tests, program factory parameters and validate every board before shipment. This step plugs naturally into our DFM (Design for Manufacturing) methodology to optimise production cost. In the field, an accessible UART port lets support teams diagnose a fault quickly without specialised equipment. We systematically recommend exposing a UART interface in each product's embedded software, even when it is not the main communication link.
Impact on product maintainability
A connected product deployed in the field for several years will inevitably require diagnostics, firmware updates or investigations following customer returns. UART offers a direct channel, readable as ASCII, that depends on no complex software stack. We design our architectures so every product exposes a documented UART access path, guaranteeing long-term maintainability and controlled after-sales support cost. This approach plugs into our prototype-to-series industrialisation process.
Summary
The UART bus is the most widely deployed asynchronous serial link in embedded electronics, used for debugging an STM32 or ESP32 just as readily as for Modbus-RTU buses on RS-485 stretching out to 1200 metres. Industrial mastery comes down to constraining three variables (voltage, baud rate and distance) through an appropriate transceiver (TTL, RS-485, RS-232) and an application protocol with CRC compliant with IEC 61158 for industrial fieldbuses.
Bottom line
The bottom line for any UART or RS-485 integration is that protocol simplicity is not the same as link reliability. A small set of disciplined choices on transceiver, clock source, error detection and lab measurement decides whether the link survives the field, and that is what this checklist captures.
- TTL for links under 3 m, RS-232 for legacy gear, RS-485 for industrial environments up to 1200 m.
- Standard baud rates: 9600, 115200, up to 24 Mbaud/s on STM32H7; external crystal mandatory above 115200.
- CRC16/CRC32 mandatory in noisy industrial environments (IEC 61000-4-4 burst, IEC 61000-4-6 RF).
- DMA + FIFO indispensable as soon as throughput exceeds a few kB/s, to free the CPU.
- FTDI FT232, Silabs CP2102, WCH CH340 USB-to-UART bridges depending on budget and reliability target; qualify each link with a Tektronix MSO64B + TekExpress capture before sign-off.
Conclusion: UART remains a must-have in 2026
The UART bus stays indispensable in 2026 despite the rise of more modern protocols (USB, Ethernet, Wi-Fi), thanks to its simplicity, universality and negligible cost.
We integrate UART links in every embedded project we deliver, whether for debugging, industrial Modbus/RS-485 communication or optimised proprietary protocols. Our expertise covers the full cycle, from initial technical specification through to final CE/FCC certification.
FAQ: UART bus in embedded systems
This UART FAQ summarises the recurring questions our customers raise on hardware sizing, diagnosis and industrial EMC constraints. Our answers draw on the relevant TIA/EIA specifications and on our hands-on field practice.
What is the difference between UART and USART?
UART stands for Universal Asynchronous Receiver-Transmitter (asynchronous only). USART adds the "S" for Synchronous, which lets it use a shared clock as in SPI. In synchronous mode, the USART generates a clock signal (SCK) that eliminates clock-drift problems. STM32 and most modern MCUs integrate USARTs (both async and sync modes), but 99% of applications only ever use the classic asynchronous mode.
Why are my UART communications unstable or showing errors?
Common causes: baud-rate mismatch (verify both ends use the same speed), inaccurate clocks (internal RC oscillators can drift 5-10%, use an external crystal above 115200 baud), cables too long (>3 m on 3.3V TTL increases noise), incompatible voltage levels (3.3V vs 5V, requires a level shifter), or no shared ground (a common GND is mandatory).
How do I choose between UART, SPI and I2C for my project?
Pick I2C to connect several peripherals with few pins (multiple sensors). Pick SPI for high throughput and full-duplex communication (displays, SD cards, flash memories). Pick UART for simple point-to-point links, debugging, long distances over RS-485, or compatibility with existing serial equipment. UART is also the only one trivially readable as ASCII on a serial terminal.
What is DMA and why use it with UART?
DMA (Direct Memory Access) lets the UART peripheral move data to or from RAM automatically, with no CPU involvement. Benefits: CPU freed for other tasks during transfers, no per-byte interrupt (only one at end of transfer), sustained throughput without data loss. Indispensable for: high-volume logs, high-speed binary protocols, real-time systems where every CPU cycle counts.
How do I secure UART communications in industrial production?
To guarantee reliability and security: implement CRC16 or CRC32 to validate packet integrity, add sequence numbers to detect lost or duplicated packets, use timeouts to detect disconnected equipment, choose RS-485 in noisy environments (EMI immunity), encrypt sensitive data (AES at the application layer), and test under realistic conditions (temperature, vibration, EMC disturbances). At AESTECHNO we systematically qualify serial links in harsh industrial environments as part of our hardware design practice.
Related articles
To go further with your embedded communication project:
- I2C bus: operation and applications - 2-wire multi-peripheral protocol
- SPI bus: integration in embedded systems - high-speed synchronous communication
- PCI Express: performance and evolution - high-bandwidth bus for complex systems
- Hardware design - protecting your communication buses and complete electronic system design
- I3C bus and MIPI sensors - the backward-compatible I2C successor
- AESTECHNO blog - more deep-dives on embedded buses, EMC and certification
Need UART expertise for your project?
We design and qualify serial links in embedded systems - from baud-rate sizing to EMC validation.