Immersion dans le monde des Moteurs Pas à Pas et leurs drivers : Les Fondements de la Précision en Mouvement
Dans l’univers des systèmes de contrôle de mouvement, les moteurs pas à pas et leurs pilotes jouent un rôle crucial. Que ce soit dans les imprimantes 3D, les machines-outils CNC, les robots ou les caméras motorisées, ces composants offrent une précision et une fiabilité inégalées. Explorez avec nous les tenants et aboutissants des moteurs pas à pas et de leurs pilotes, des technologies qui révolutionnent notre capacité à contrôler le mouvement avec une précision extrême.
Les Moteurs Pas à Pas : Fondements du Contrôle de Précision
Les moteurs pas à pas sont des dispositifs électromécaniques qui convertissent des signaux électriques en mouvement angulaire discret, étape par étape. Contrairement aux moteurs à courant continu qui tournent en continu, les moteurs pas à pas avancent par incréments distincts, appelés pas, offrant un contrôle précis sur la position et la vitesse.
Les Moteurs Pas à Pas : Fondements du Contrôle de Précision
Les moteurs pas à pas sont des dispositifs électromécaniques qui convertissent des signaux électriques en mouvement angulaire discret, étape par étape. Contrairement aux moteurs à courant continu qui tournent en continu, les moteurs pas à pas avancent par incréments distincts, appelés pas, offrant un contrôle précis sur la position et la vitesse.
Fonctionnement des Moteurs Pas à Pas :
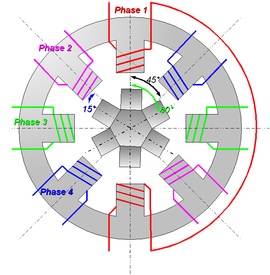
Les moteurs pas à pas se composent généralement d’un rotor et d’un stator, avec des enroulements de bobine sur chacun. Le mouvement est induit en activant les bobines séquentiellement à l’aide de signaux de commande précis. Chaque activation déplace le rotor d’un pas fixe, permettant un contrôle précis de la rotation.
Avantages des Moteurs Pas à Pas :
- Précision : Les moteurs pas à pas offrent un contrôle précis sur la position et la vitesse, ce qui les rend idéaux pour les applications nécessitant un positionnement précis.
- Fiabilité : En l’absence de balais ou de commutateurs mécaniques, les moteurs pas à pas offrent une fiabilité accrue et une durée de vie plus longue.
- Couple Élevé à Basse Vitesse : Les moteurs pas à pas fournissent un couple élevé même à basse vitesse, ce qui les rend adaptés à une gamme étendue d’applications.
- Simplicité de Contrôle : Le contrôle des moteurs pas à pas est relativement simple, nécessitant généralement des signaux de commande de séquence de pas.
Les Pilotes de Moteurs Pas à Pas : Ponts vers un Contrôle Précis
Les pilotes de moteurs pas à pas agissent comme des interfaces entre les microcontrôleurs ou les contrôleurs de mouvement et les moteurs eux-mêmes. Ils amplifient les signaux de commande et fournissent la puissance nécessaire pour entraîner les bobines du moteur, tout en assurant un contrôle précis et fluide du mouvement.
Fonctionnement des Pilotes de Moteurs Pas à Pas :
Les pilotes de moteurs pas à pas prennent généralement en charge divers modes de fonctionnement, tels que le mode complet, demi-pas ou micro-pas, offrant une flexibilité dans la résolution du mouvement. Ils fournissent également des fonctions de protection contre les surintensités, la surchauffe et les surtensions pour garantir le bon fonctionnement du système.
Avantages des Pilotes de Moteurs Pas à Pas :
- Contrôle Précis du Mouvement : Les pilotes de moteurs pas à pas permettent un contrôle précis du mouvement, avec la capacité de régler la résolution du pas pour répondre aux besoins spécifiques de l’application.
- Protection Intégrée : Les fonctionnalités de protection intégrées garantissent la sécurité et la fiabilité du système en surveillant les conditions de fonctionnement critiques.
- Compatibilité : Les pilotes de moteurs pas à pas sont compatibles avec une variété de microcontrôleurs et de contrôleurs de mouvement, offrant une intégration aisée dans diverses applications.
- Optimisation de la Performance : En ajustant les paramètres de commande, les pilotes de moteurs pas à pas peuvent optimiser la performance du moteur pour une efficacité maximale et un fonctionnement silencieux.
Courbes en S : Une Approche Avancée du Pilotage des Moteurs Pas à Pas
Une méthode avancée de pilotage des moteurs pas à pas consiste à utiliser des courbes en S pour contrôler le mouvement. Cette technique permet d’optimiser la vitesse et l’accélération du moteur de manière plus fluide, réduisant ainsi les vibrations et les à-coups lors du déplacement. En utilisant des profils de mouvement en forme de courbe en S, le moteur peut accélérer progressivement jusqu’à sa vitesse maximale, maintenir cette vitesse pendant un certain temps, puis décélérer progressivement jusqu’à l’arrêt, créant ainsi des transitions plus douces et plus naturelles. Cette approche améliore non seulement la précision du positionnement, mais contribue également à prolonger la durée de vie du moteur en réduisant les contraintes mécaniques et les efforts sur les composants. Les pilotes de moteurs pas à pas avancés offrent souvent des fonctionnalités intégrées pour la mise en œuvre de courbes en S, permettant aux développeurs d’exploiter pleinement les capacités de leurs systèmes de contrôle de mouvement.
Pourquoi Choisir AESTECHNO ?
- 10+ ans d’expertise en contrôle moteur et automatisation
- 100% de réussite aux certifications CE/FCC
- 50+ projets robotique et motion control livrés
- Bureau d’études français basé à Montpellier
Conclusion : La Puissance du Contrôle Précis
Dans le domaine du contrôle de mouvement, les moteurs pas à pas et leurs pilotes représentent l’essence même de la précision et de la fiabilité. Leur capacité à convertir des signaux électriques en mouvement contrôlé avec une précision extrême ouvre la voie à une multitude d’applications, de l’impression 3D à la robotique médicale en passant par l’automatisation industrielle. Alors que la demande de mouvement précis continue de croître, ces technologies continueront de jouer un rôle central dans notre capacité à façonner le monde qui nous entoure.
Projet Contrôle Moteur ? Expertise AESTECHNO
Vous développez un système avec moteurs pas-à-pas ou servo ? Nos experts vous accompagnent :
- Sélection drivers et moteurs adaptés
- Développement firmware temps réel (courbes en S)
- Conception carte puissance et commande
- Certification CEM et sécurité machine
AESTECHNO développe des systèmes de contrôle de moteurs pas à pas.
Articles Connexes
- Accéléromètres MEMS – Capteurs de mouvement pour systèmes embarqués
- De l’idée au produit certifié – Méthodologie de conception électronique
- Conception carte électronique – Guide complet schéma, routage, industrialisation
Moteurs pas-à-pas : un choix déterminant pour vos systèmes de précision
Pour les décideurs techniques, le choix du moteur pas-à-pas impacte directement la qualité et la fiabilité de vos produits. Un moteur bien dimensionné et correctement piloté garantit une précision de positionnement constante sur toute la durée de vie du système, réduisant ainsi les coûts de maintenance et les retours SAV. Chez AESTECHNO, nous avons constaté que les erreurs de dimensionnement moteur en phase de conception entraînent souvent des reprises coûteuses en production. Un accompagnement expert dès le cahier des charges permet d’optimiser le coût total de possession : sélection du driver adapté, développement d’un firmware de contrôle moteur robuste, et validation de la conformité CEM des étages de puissance. Une conception produit maîtrisée dès le départ sécurise votre planning et votre budget.
FAQ : Moteurs Pas-à-Pas
Quelle est la différence entre moteur pas-à-pas unipolaire et bipolaire ?
Unipolaire : bobinage avec point milieu, pilotage simple (4-5 fils), couple inférieur, convient aux applications basiques. Bipolaire : bobinage sans point milieu, nécessite pont en H (driver plus complexe), couple supérieur (+30-40%), efficacité meilleure, préféré pour robotique/CNC. Choisissez unipolaire pour prototypage simple, bipolaire pour performance maximale.
Qu’est-ce que le microstepping et pourquoi l’utiliser ?
Le microstepping divise chaque pas en sous-pas (1/2, 1/4, 1/8, 1/16, jusqu’à 1/256) en modulant le courant dans les bobines. Avantages : mouvement plus fluide, vibrations réduites, résolution accrue, fonctionnement silencieux. Inconvénient : couple légèrement réduit aux microsteps intermédiaires. Idéal pour imprimantes 3D, caméras motorisées, équipements médicaux nécessitant précision et silence.
Pourquoi utiliser des courbes en S pour le pilotage ?
Les courbes en S (profils de mouvement S-curve) offrent accélération/décélération progressive vs profils trapézoïdaux brusques. Bénéfices : vibrations réduites, contraintes mécaniques minimisées, résonances évitées, durée de vie moteur prolongée, précision positionnement améliorée. Essentiel pour applications haute précision (pick-and-place, gravure laser) ou charges fragiles. Drivers avancés (TMC2209, STM32 avec rampes logicielles) intègrent cette fonctionnalité.
Comment choisir entre moteur pas-à-pas et servomoteur ?
Pas-à-pas : boucle ouverte, précision position sans encodeur, maintien couple à l’arrêt, coût faible (10-100 €), vitesse limitée (<2000 RPM). Servomoteur : boucle fermée avec encodeur, couple élevé, vitesses hautes (>5000 RPM), précision dynamique, coût élevé (100-1000 €). Utilisez pas-à-pas pour : positionnement précis à coût réduit (imprimantes 3D, CNC hobby). Utilisez servo pour : dynamique élevée, couples importants (robotique industrielle, machines-outils).
Comment éviter le phénomène de perte de pas (step loss) ?
Causes : charge excessive, accélération trop rapide, résonance, alimentation insuffisante. Solutions : dimensionner moteur avec marge 50-100% sur couple requis, implémenter rampes accélération/décélération progressives, éviter vitesses de résonance (typiquement 100-300 Hz) via microstepping ou amortisseurs, alimenter correctement (voltage 2-3x tension nominale bobine), ajouter encodeur en boucle fermée si critique (système hybride « closed-loop stepper »).